About us
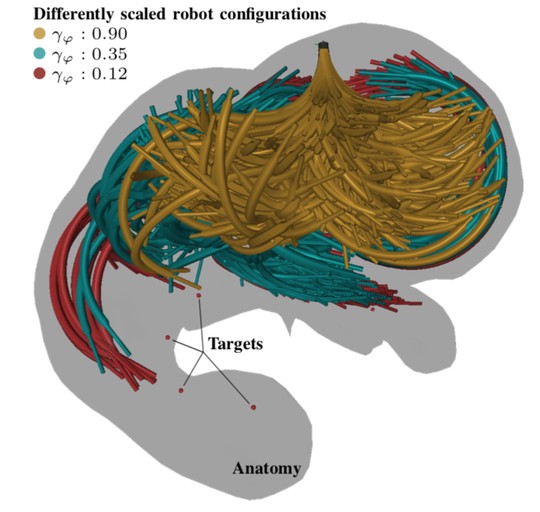
The mission of the Robotics and Vision in Medicine (RViM) Lab is to develop image-guided micro-precise instruments that deliver regenerative therapies deep into the human body.
We are with the Dep. Surgical and Interventional Engineering, School of Biomedical Engineering and Imaging Sciences, King’s College London.
Feel free to contact us for open PhD and post-doc positions. We are happy to support candidates to apply for fellowships to work within our group [Fellowships by the EPSRC, Royal Academy of Engineering, Royal Society (e.g. Newton International Fellowships), The Wellcome Trust, the Leverhulme Trust, and the European Union (MSC actions)].
If you are interested in a Ph.D. in Medical Image Computing and Computer-Assisted Interventions, make sure you pay close attention to the deadlines of the Medical Image Computing CDT. Also, be aware that King’s offers excellent scholarship opportunities for UK/EU and overseas students.
Contact us at: christos.bergeles@kcl.ac.uk